Depth Analysis With Stereo Camera
Team Members: Timo Hohn, Leo Nickerson
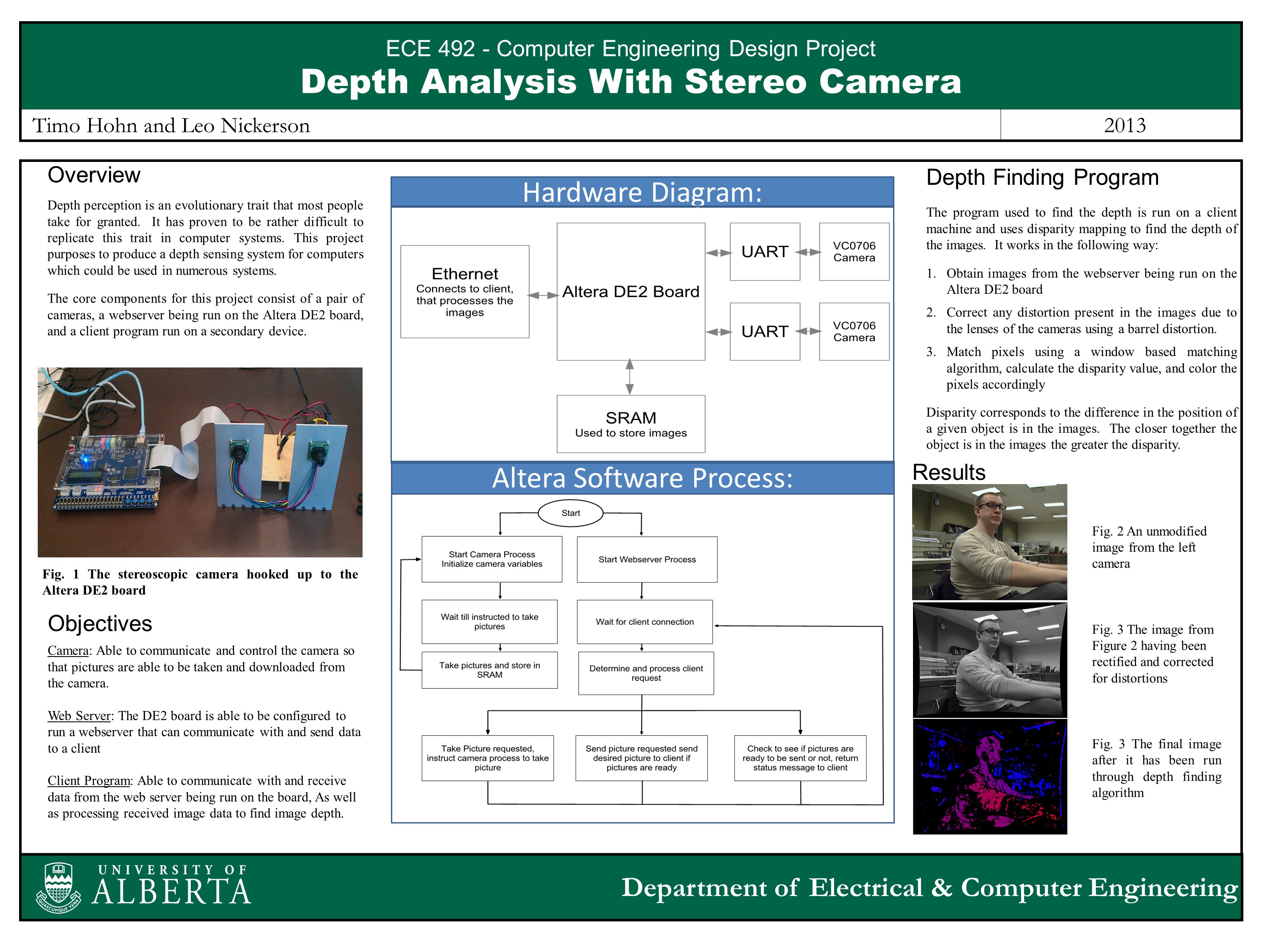
Depth perception is an evolutionary trait that most people take for granted. It has proven to be rather difficult to replicate this trait in computer systems. This project purposes to produce a depth sensing system for computers which could be used in numerous systems. The core components for this project consist of a pair of cameras, a webserver being run on the Altera DE2 board, and a client program run on a secondary device.